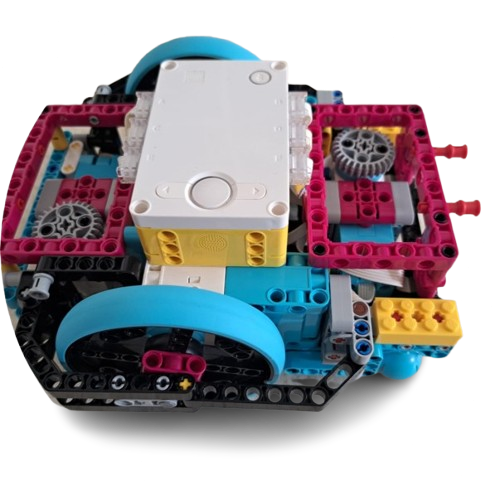
Design 1: Advanced Driving Base
Last year, we noticed that our robot often drifted. We focused on weight distribution and the center of gravity to improve stability.
The wide axle width was intended to stabilize the robot.
We found the robot was too wide to navigate missions predictably.
We learned that a slimmer design would be more effective.
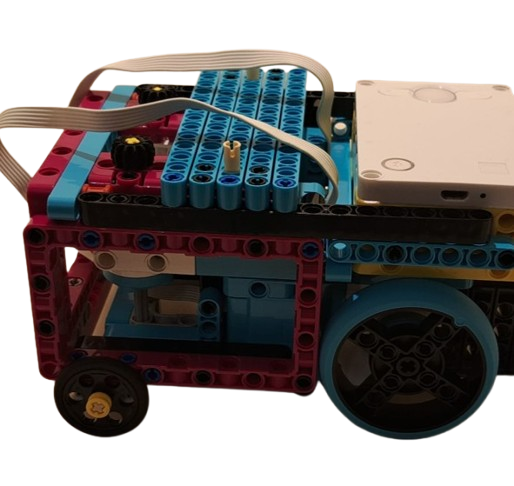
Design 2: The Hummer One
After research, we found a slimmer design that allowed for better maneuverability.
The new frame was thinner and more effective in navigating obstacles.
We adapted cog interfaces to allow for better attachment usage.
We optimized attachment fitting to use resources efficiently.

Final Design: Sharko-Polo
We optimized our final design for efficiency, space, and ease of use.
Our new cog interfaces allow more space and six securing pins for better attachments.
We removed unnecessary pieces to be resource-efficient.
Keeping the center of gravity low improves stability and traction.
Coding Our Robot
We used Pybricks and Python for programming, improving control and efficiency.
Adjusting PID controls significantly improved robot accuracy.
We learned to use multi-task functions for better robot performance.
We switched from a color sensor to a Gyro sensor for better navigation.